
本发明公开一种水下双臂机器人装置系统,包括机器人架体、双臂结构和潜行系统结构;所述机器人架体整体呈扁条块状,且所述机器人架体呈镂空框架结构;所述机器人架体内部设置潜行系统结构;所述潜行系统结构带动机器人架体在水中下潜行进,且所述机器人架体的前进端上设置双臂结构抓取剪切水下的物体。本发明提供一种水下双臂机器人装置系统能有效的下潜到水下,并对水下进行探寻或清理的效果。
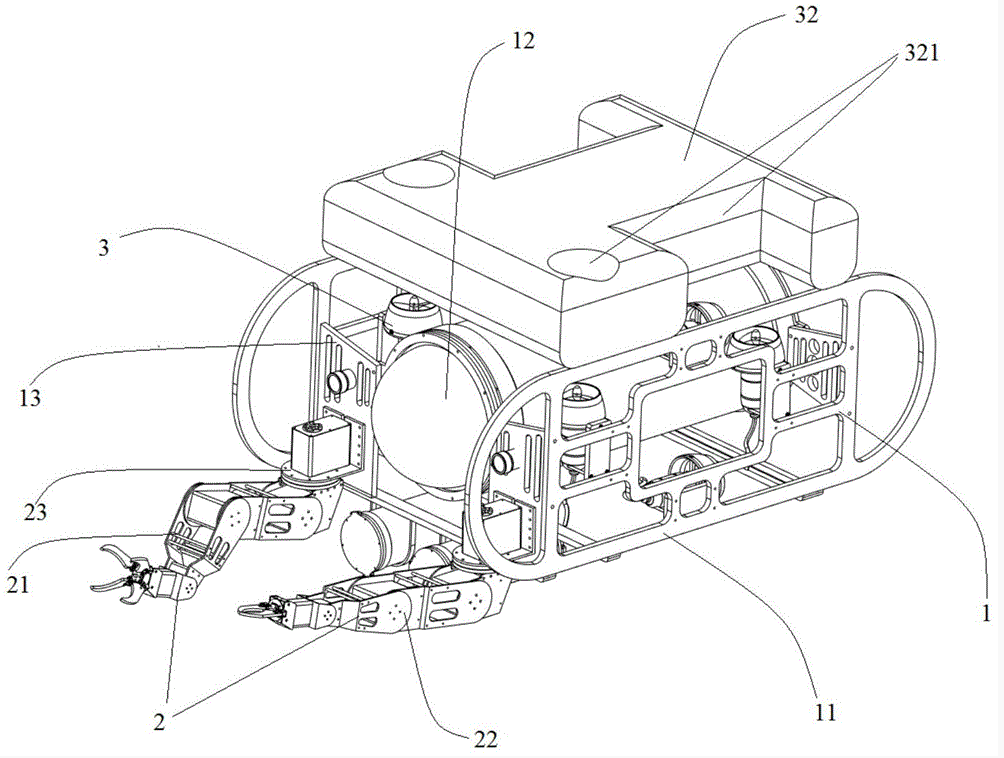
1.一种水下双臂机器人装置系统,其特征在于:包括机器人架体(1)、双臂结构(2)和潜行系统结构(3);所述机器人架体(1)整体呈扁条块状,且所述机器人架体(1)为镂空框架结构;所述机器人架体(1)内部设置潜行系统结构(3);所述潜行系统结构(3)带动机器人架体(1)在水中下潜行进,且所述机器人架体(1)的前进端上设置双臂结构(2)抓取剪切水下的物体。
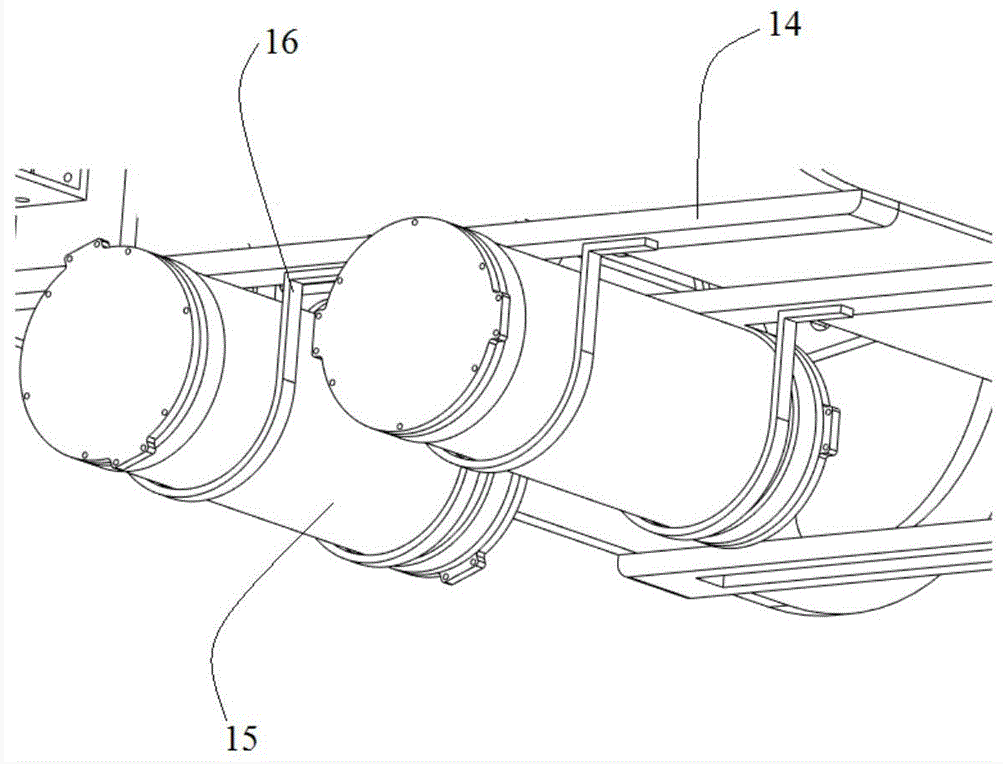
2.根据权利要求1所述的一种水下双臂机器人装置系统,其特征在于:所述机器人架体(1)包括侧架(11);所述侧架(11)上开设有多个贯通孔(111);多个所述侧架(11)竖向平行设置,且多个所述侧架(11)底端之间通过多条横条(14)固定连接;多条横条(14)底端通过U型卡条(16)卡设有辅助舱(15),且朝向于机器人架体(1)行进方向一端设置;沿所述机器人架体(1)长度方向中部设置有密封舱(12);所述密封舱(12)两端分别通过固定架(13)稳定于侧架(11)之间。
3.根据权利要求2所述的一种水下双臂机器人装置系统,其特征在于:所述密封舱(12)内设置有重心稳定结构(4);所述重心稳定结构(4)包括调节行走结构(6)和配合导轨结构(41);所述配合导轨结构(41)固定在密封舱(12)内壁,且沿密封舱(2)长度方向延伸设置;所述调节行走结构(6)滑动设置于配合导轨结构(41)上。
4.根据权利要求3所述的一种水下双臂机器人装置系统,其特征在于:所述配合导轨结构(41)包括安装板(411)和导柱(413);所述安装板(411)固定横置于密封舱(12)中部内壁,且所述安装板(411)垂直于侧架(11);所述安装板(411)两端底面分别固设有稳定固定座(414);所述稳定固定座(414)上沿安装板(411)长度方向上开设有多个嵌合孔(415);所述导柱(413)两端分别嵌入嵌合孔(415)内;所述稳定移行结构(6)滑动套设于导柱(413)上;
所述调节行走结构(6)包括滑动箱体(61)和调节块结构(62);所述滑动箱体(61)两侧壁上开设有多个套结孔(611);所述滑动箱体(61)通过套结孔(611)套结在导柱(413)上,且滑动连接;多条所述导柱(413)对称中心轴处设置有旋转杆(621);所述旋转杆(621)通过套结孔(611)贯穿于滑动箱体(61),且驱动装置与旋转杆(621)驱动连接;所述滑动箱体(61)内固定设置调节块结构(62);所述旋转杆(621)贯穿于调节块结构(62),且所述调节块结构(62)内螺纹与旋转杆(621)外螺纹咧合设置。
5.根据权利要求1所述的一种水下双臂机器人装置系统,其特征在于:所述潜行系统结构(3)包括推进器(33);所述推进器(33)通过支架管(331)固定在侧架(11)内壁上的固定板(332)上;多个所述推进器(33)整体呈间距首尾相连环向设置,且竖向的多个推进器(33)推进方向朝向水下,且横向的多个推进器(33)推进方向朝向机器人前进端。
6.根据权利要求5所述的一种水下双臂机器人装置系统,其特征在于:所述潜行系统结构(3)还包括气浮腔(32);所述气浮腔(32)固设在对称的侧架(11)顶部;所述气浮腔(32)为中空腔体结构,且所述气浮腔(32)上开设有多个槽口(321);所述槽口(321)贯通至机器人架体(1)内;多个所述槽口(321)分别对应于多个推进器(5)的桨叶出水端。
7.根据权利要求1所述的一种水下双臂机器人装置系统,其特征在于:所述双臂结构(2)包括四指抓臂结构(21)和双指切臂结构(22);所述四指抓臂结构(21)和双指切臂结构(22)分别通过摆动结构(23)设置在固定架(13)侧壁上;所述摆动结构(23)包括连接块(231)和摆动肩臂(232);所述连接块(231)固定于固定架(13)侧壁上;所述连接块(231)底部设置摆动肩臂(232),且所述连接块(231)上驱动装置的输出轴与摆动肩臂(232)顶部驱动连接;所述摆动肩臂(232)分别与四指抓取臂结构(21)和双指剪切臂结构(22)的臂端转动连接。
8.根据权利要求7所述的一种水下双臂机器人装置系统,其特征在于:所述四指抓臂结构(21)和双指切臂结构(22)分别包括大臂(221)和小臂(222);所述大臂(221)一端夹设在摆动肩臂(232)上,且转动设置;所述小臂(222)夹设在大臂的另一端,且转动设置;所述小臂(222)另一端渐进减小;
所述四指抓臂结构(21)还包括四指结构(5)和腕部结构(211);所述腕部结构(211)一端夹设在小臂(222)的减小端上;所述腕部结构(211)另一端固设四指结构(5);所述四指结构(5)包括固定盘(51)和弧型手指(52);所述固定盘(51)上环向固定有多个嵌合槽(53),且远离小臂(222)一侧;所述弧型手指(52)根部嵌入嵌合槽(53)内,且转动设置;所述腕部结构(211)内动力机构的伸缩柱贯穿固定盘(51),且滑动连接;所述伸缩柱的延伸端固设有牵引环块(54);所述牵引环块(54)周边环向固定布置有多个牵引槽(541);所述弧型手指(52)根部位置朝向伸缩柱一侧上固定有牵拉环(55);所述牵拉环(55)对应于牵引槽(541),且转动设置;所述伸缩柱驱动牵引环块(54)牵引牵拉环(55)带动弧型手指(52)摆动;
所述双指剪臂结构(22)包括剪切结构(24);所述剪切结构(24)中的两个弧型手指(52)指尖贴合处设置有切割结构(56);所述切割结构(56)包括切割刀片(561);一个所述弧型手指(52)的指尖上固设切割刀片(561),且沿弧型手指(52)延伸方向设置;另一个所述弧型手指(52)的指尖上开设有配合孔槽(562);所述伸缩柱驱动牵引圆环块(54)牵引牵拉环(55)带动和弧型手指(52)摆动靠拢时,所述切割刀片(561)对应嵌入配合孔槽(562)内。
9.根据权利要求1所述的一种水下双臂机器人装置系统,其特征在于:所述机器人架体(1)周边还设置有相机云台结构(7);所述相机云台结构(7)包括第一云台(71)和第二云台(72);所述第一云台(71)固设于气浮体(32)顶部,且所述第一云台(71)的探照端环向旋转;多个所述第二云台(72)固设于机器人架体(1)侧边,且所述第二云台(72)的探照端弧形摆动;
所述第一云台(71)和第二云台(72)分别包括安装底座(711)、相机本体(712)和L型换向安装座(713);所述相机本体(712)设置在安装底座(711)上的转动台(714)上;动力装置与转动台(714)驱动连接;所述相机本体(712)两侧壁上固设有稳固台(715)所述L型换向安装座(713)的横向通过螺栓固定于稳固台(715)上,且随相机本体(712)转动;所述L型换向安装座(713)纵向远离相机本体(712)的一侧上设置有另一个转动台(714),且所述转动台(714)上设置有另一个相机本体(712);
所述第一云台(71)的安装底座(711)固定于气浮体(32)顶部;所述第一云台(71)中L型换向安装座(713)横向上的相机本体(712)探照端自转且朝向水面,且所述L型换向安装座(713)纵向上的相机本体(712)探照端周向旋转且朝向周围;
所述第二云台(72)的安装底座(711)一侧壁固设有稳固板(716);所述第二云台(72)通过稳固板(716)对称固定于机器人架体(1)两侧壁上;所述第二云台(72)中L型换向安装座(713)横向上的相机本体(712)探照端弧形摆动且朝向水下,且所述L型换向安装座(713)纵向上的相机本体(712)探照端弧形摆动且朝向侧边。
10.根据权利要求9所述的一种水下双臂机器人装置系统,其特征在于:对称的所述第二云台(72)中L型换向安装座(713)纵向上的相机本体(712)探照端的运动轨迹整体为椭圆形,且对称的第二云台(72)中L型换向安装座(713)纵向上的相机本体(712)处于椭圆形同一轴线上时运动方向相同,且所述相机本体(712)探照端靠近侧架(11)侧壁时的速度大于远离侧架(11)侧壁时的速度。
请联系平台。




