
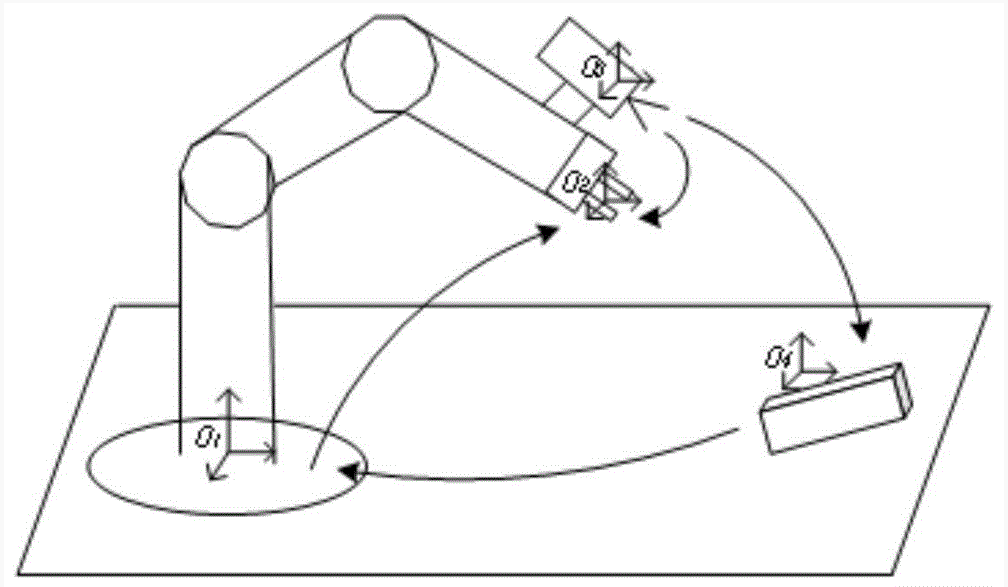
本发明公开了视觉伺服机械臂抓取最佳位姿检测方法,主要包括以下步骤:步骤一,读取照片;步骤二,提取SURF特征点;步骤三,根据SURF特征点生成图像的特征向量;步骤四,初步建立一个匹配对(含野值);步骤五,预防仿射变化,去除不满足变化的野值;步骤六,获取目标物的多边形框;步骤七,二维坐标系下最佳位姿解算;步骤八,伺服控制机械臂抓取物品。该方法将单目视觉与伺服机械臂相结合,利用两点间求斜率的几何关系进而求出目标物体的最佳位姿角,即伺服机械手抓应旋转的角度,简单易行,占用问题少,计算速度快,具有广阔的应用前景。
1.视觉伺服机械臂抓取物品最佳位姿检测方法,其特征在于:包括以下步骤,
步骤一,读取照片;
步骤二,提取SURF特征点;
步骤三,根据SURF特征点生成图像的特征向量;
步骤四,初步建立一个含野值的匹配对;
步骤五,预防仿射变化,去除不满足变化的野值;
步骤六,获取目标物的多边形框;
步骤七,二维坐标系下最佳位姿解算;
步骤八,伺服控制机械臂抓取物品;
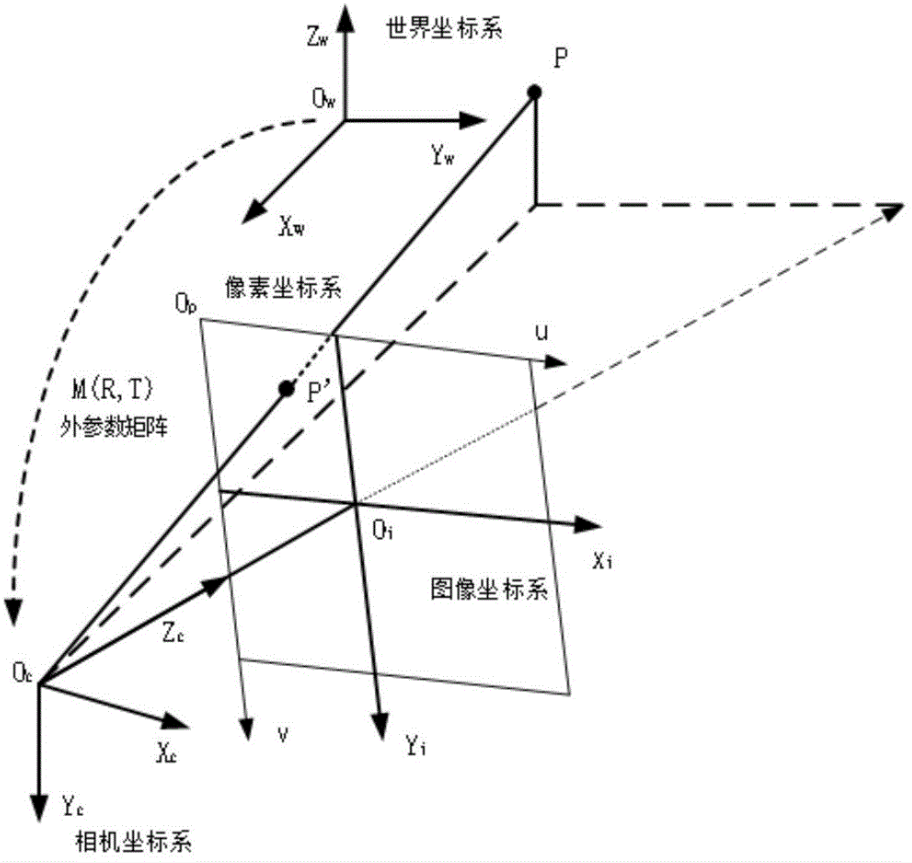
在步骤一中,采用相机成像模型进行照片拍摄和相机标定;所述相机成像模型由世界坐标系Ow-XwYwZw、相机坐标系Oc-XcYcZc、像素坐标系Op-uv和图像坐标系Oi-XiYi构成;其中P是相机坐标系中的一点,坐标是(Xc,Yc,Zc);P’是在图像中的成像点,在图像坐标系的坐标是(x,y),在像素坐标系是(u,v);相机标定是为了确定相机坐标系、图像坐标系、像素坐标系与真实坐标系之间的关系;
在步骤二中,包括以下子步骤,
子步骤一,建立积分图像;通过简单的加减法去计算任一区域的像素之和,矩形ABCD内所有像素的灰度值之和计算公式为:
Σ=A-B-C+D
子步骤二,建立Hessian矩阵;一个像素点(x,y),设函数f(x,y)的Hessian矩阵定义为:

可以看出H矩阵由函数f的二阶偏导数构成,每一个像素点都可以解算出一个H矩阵;式中:Lxx(x,σ)为函数f与尺度为σ的高斯二阶导数的卷积其定义如下:

对于Lxy(x,σ)和Lyy(x,σ),定义相似;
子步骤三,建立尺度空间;SUFR特征极值点的检测算法和提取是基于尺度空间理论;通过改变使用高斯滤波器的尺度,不是改变图像本身来构成对不同尺度的响应;
子步骤四,提取特征点;利用非极值去除掉确定特征点,在海森行列式图像的每个像素点与3维邻域的26个点进行大小比较,设定一个阈值,用3维线性插值法得到亚像素级的特征点后,去掉特征值小于阈值的点,得出更稳定的点;
子步骤五,选取特征点的方向;以特征点为中心,检测兴趣点确定尺度s,统计扇形内所有点的Haar小波响应,并给靠近特征点的像素赋予较大的权重;统计该区域所有Haar小波响应之和,形成矢量,即扇形的方向;遍历所有的扇形区域,选择最长矢量方向作为该特征点的方向;
子步骤六,构造SURF的特征点描述子;以特征点为中心,构造出以20s为边长的正方形窗口,s为特征点所在的尺度;将其分为16个4×4的子区域,每个子区域统计包含有25个像素元的水平x和垂直y的Haar小波特征之和分别为ΣHx和ΣHy;统计出每个子区域的4维描述子V=[∑Hx,∑Hy,∑|Hx|,∑|Hy|],得出特征向量长度为64维的特征描述子;
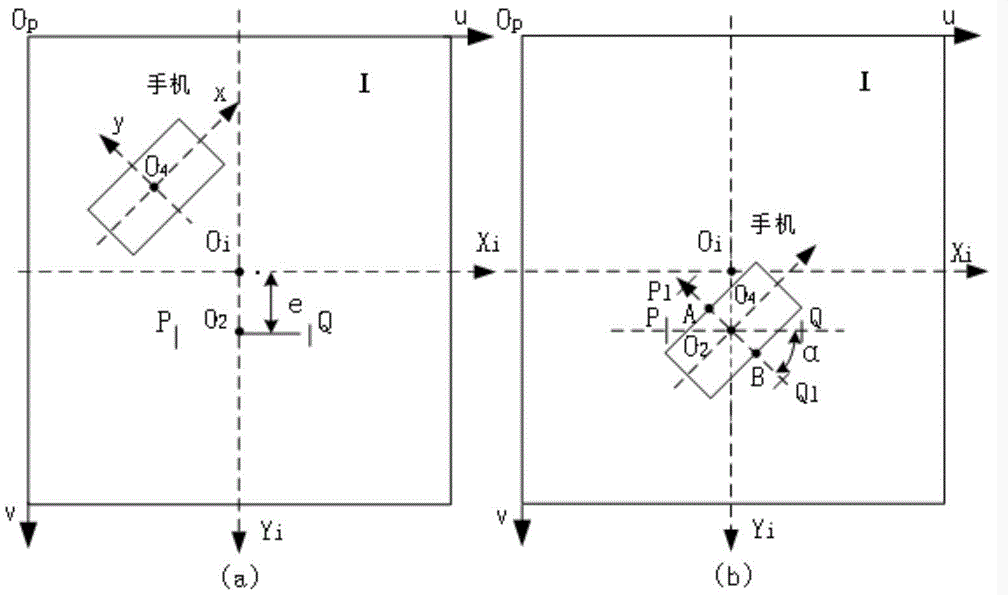
在步骤七中,
将图像在像素坐标系Op-uv中位置关系转化为图像的物理坐标Oi-XiYi,其目的是在图像的物理坐标系中可以进行几何关系的计算,转化公式为矩阵形式(4):

其中(u,v)是在水平方向上和垂直方向的像素,设Oi(u0,v0)是图像的坐标系中心的像素,dx和dy是每个像素在x轴和y轴的方向上的实际物理尺寸,由相机的标定可以知u0,v0,dx,dy;SURF不变特征点算法匹配到的物品矩形框CDEF中利用图像算法可求出物品的质心O4(us,vs)和CDEF的像素坐标,根据几何关系进而可以求出物品的抓持点A(u1,v1)和B(u2,v2)的像素坐标,其匹配到的物品矩形框;
将物品的抓持点A(u1,v1)和B(u2,v2)的像素坐标带入公式(4)推导可得A和B的物理坐标,如公式(5):

以及公式(6):

所求出A(x1,y1)和B(x2,y2)的图像物理坐标,可以解出夹角α即最佳位姿角,理论上伺服给机械手抓的旋转角度也应为α,但由于机械臂的系统误差使得旋转角度小于或大于α,故取旋转角度为β;取机械手抓相对物品顺时针旋转为正,逆时针旋转为负,利用在坐标系中由两点之间的几何关系可求其斜率,可得公式(7):

由公式(5)(6)(7)可得公式(8):

求出公式(8)中的角度α,取值范围[0,90°],若为正则机械手抓顺时针旋转,负则逆时针旋转;α是物品在二维平面的位姿角也是机械手抓旋转的夹持角,其夹持点为A和B两点;由公式(8)可知,dx,dy是相机内参数,故α只与夹持点A和B两点的像素点的差值有关,简化了图像中复杂的计算,从而提高视觉伺服效果。
请联系平台。




