
本发明涉及一种紧凑型高推动比水下机器人,包括机器人主体、推进装置、照明装置和电源装置,通过在半球罩与法兰之间设有第一密封圈、法兰与舱体之间设有第二密封圈,再用螺栓将压盖、半球罩、法兰和舱体固定成一个密封的整体,保证了机器人舱体的密封性能;采用竖直推进装置的外壳将水平推进器、竖直推进器及照明装置集成为一体,推进器整体结构更加紧凑,使得水下机器人体积更小,再加上舱体上的把手设计,非常便携;采用新型的ROVMAKER水下电机,下潜深度更深,耐腐蚀能力极强,安全可靠,同时由于其体积较小,自身的密封性能很好,使得紧凑型高推动比水下机器人的整体结构具有体积小、密封性好、推动比高的优点。
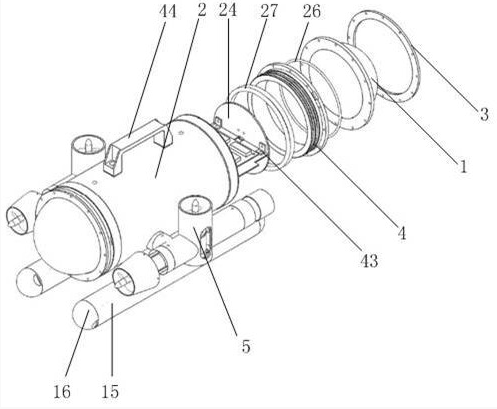
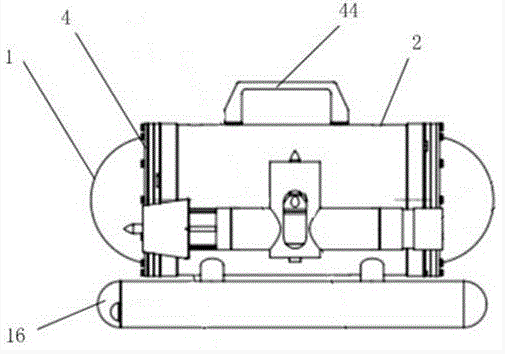
1.一种紧凑型高推动比水下机器人,其特征在于:包括机器人主体、推进装置、照明装置和电源装置,所述机器人主体包括壳体和固定于壳体内的控制装置,所述壳体由两端的半球罩(1)和中间的舱体(2)构成,半球罩(1)上套设有压盖(3),半球罩(1)与舱体(2)之间设置有法兰(4);螺栓通过压盖(3)、半球罩(1)和法兰(4)上的螺孔将压盖(3)、半球罩(1)、法兰(4)和舱体(2)固定成一个密封的整体;
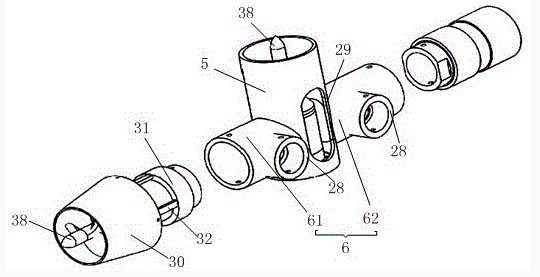
所述推进装置包括竖直推进装置和水平推进装置,所述照明装置和水平推进装置分别设置于所述竖直推进装置两侧;所述竖直推进装置包括外壳和安装于所述外壳内的推进器;外壳由轴心线相互垂直相交的竖直套筒(5)和水平套筒(6)组成,所述水平推进装置和照明装置分别与水平套筒(6)的两端连接;所述竖直套筒(5)底部内壁上通过多个连杆固定设置有一固定板(7),所述推进器设置于所述竖直套筒(5)内,且所述推进器底部固定于所述固定板(7)上;
所述照明装置包括紧固件(8)、密封卡件(9)、密封圈(10)、灯体(11)、灯罩(12)和套筒(13);所述密封卡件(9)包括固定部(91)和密封杆(92),所述固定部(91)和密封杆(92)为一体成型结构;所述密封杆(92)自由端与所述灯体(11)螺纹连接,所述密封杆(92)上套设有多个所述密封圈(10);所述灯罩(12)为一端开口的桶状结构,所述密封卡件(9)和所述灯体(11)设置于所述灯罩(12)内,所述固定部(91)抵触在所述灯罩(12)开口处;所述套筒(13)为一端开口的桶状结构,所述灯罩(12)设置于所述套筒(13)内;所述套筒(13)开口处与所述紧固件(8)螺纹连接,且紧固件(8)伸入所述套筒(13)的一端端面抵触在所述固定部(91)上;所述套筒(13)底壁上开设有一透光孔;所述紧固件(8)另一端与所述水平套筒(6)的一端固定连接;
所述竖直推进装置的外壳与固定于舱体(2)上的推进器对接部(45)固定连接,将推进装置固定于舱体(2)上;
所述电源装置包括电池仓(15)和电池仓(15)内固定的电池组,电池仓的两头螺纹连接有电池仓紧固头(16),电池仓(15)通过连接部(14)固定于舱体(2)的下方;
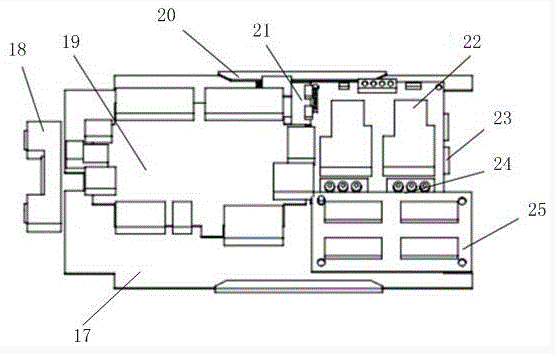
所述控制装置包括控制底板(17)和通过铜柱固定于控制底板上的控制元器件,所述控制元器件包括摄像头(18)、主控板(19)、电路板卡槽(20)、小继电器模块(21)、大继电器模块(22)23、AV转双绞线模块(23)、可调电源模块(24)和电调板(25);可调电源模块(24)与电池组进行连接,通过电池组向所述控制元器件提供电源;电调板(25)上装有电调,通过铜柱置于可调电源模块(24)上方;
所述半球罩(1)与法兰(4)之间设有第一密封圈(26),法兰(4)与舱体(2)之间设有第二密封圈(27);
所述摄像头(18)为双目摄像头,通过U型板(41)固定于挡板(42)上,所述挡板(42)与控制底板(17)通过L型板(43)固定连接。
2.根据权利要求1所述的紧凑型高推动比水下机器人,其特征在于:所述水平套筒(10)分布于所述竖直套筒(5)左、右两侧的筒壁上均设置有向同一方向延伸的、用于连接舱体(2)的连接件(28);两个所述连接件(28)的轴心线相互平行、且与所述水平套筒(10)和竖直套筒(5)的轴心线均相互垂直;所述竖直套筒(5)的筒壁上设置有引流孔(29)。
3.根据权利要求2所述的紧凑型高推动比水下机器人,其特征在于:所述水平推进装置包括导流罩(30)、电机后套(31)和所述推进器,所述导流罩(30)套设于所述推进器上,所述推进器底部嵌入所述电机后套(31)内,所述电机后套(31)和导流罩(30)之间通过多根固定条(32)固定连接;
所述水平推进装置和竖直推进装置之间通过所述电机后套(31)与所述水平套筒(10)的另一端固定连接。
4.根据权利要求3所述的紧凑型高推动比水下机器人,其特征在于:所述推进器包括螺旋桨(33)和水下电机(34),所述螺旋桨(33)与所述水下电机(34)的转子端(35)之间设置有一锥台型的电机前套(36),所述电机前套(36)的小头端上设置有一桨轴(37);
所述电机前套(36)的大头端与所述水下电机(34)转子端(35)固定连接;所述桨轴(37)的自由端穿过所述螺旋桨(33)的桨套中心通孔,并且与子弹头螺母(38)连接,以实现固定所述螺旋桨(33)。
5.根据权利要求4所述的紧凑型高推动比水下机器人,其特征在于:所述电机前套(36)的小头端上设置有一凸台(39),所述桨轴(37)固定于所述凸台(39)上;
所述螺旋桨(33)的桨套底端设置有一凹槽,当所述桨轴(37)穿过所述桨套时,所述凸台(39)伸入所述凹槽内,以实现所述螺旋桨(33)和所述电机前套(36)之间的周向防转。
6.根据权利要求5所述的紧凑型高推动比水下机器人,其特征在于:所述竖直推进装置内的所述推进器水下电机(34)定子端(40)与所述固定板(7)固定连接;
所述水平推进装置内的所述推进器水下电机(34)定子端(40)嵌入、且固定于所述电机后套(31)内。
7.根据权利要求3所述的紧凑型高推动比水下机器人,其特征在于:所述水下电机(34)的型号为ROVMAKER。
请联系平台。




