
本实用新型涉及爬壁机器人技术领域,具体公开了一种爬壁机器人磁吸附装置,包括:移动机构,移动机构包括机器人主体和定位轨板,磁吸机构,磁吸机构包括第一活动轴和第二活动轴,第一活动轴和第二活动轴分别设置在两个弹簧阻尼装置的下方,第一活动轴和第二活动轴一端均设置有驱动组件,驱动组件一端连接有移动轮,移动轮内固定安装有若干加强筋,每两个加强筋之间均放置有永磁体;本实用新型通过设置移动机构和磁吸机构,当本装置所移动的外壁具有一定弧度时,第一活动轴可通过活动组件与第二活动轴形成与该弧度相适应的夹角,从而能够保证设备两端的移动轮都能够与外壁稳定吸附,且不会受塔筒外壁的焊缝影响,提高了移动时的安全性和可靠性。
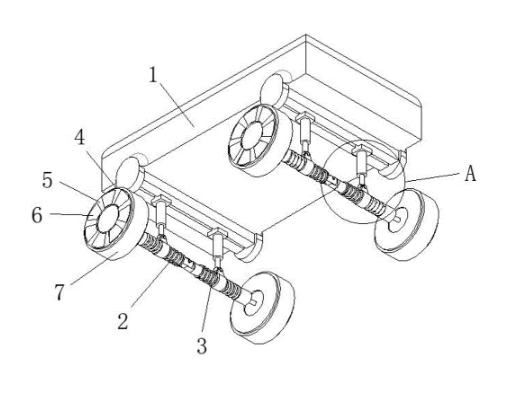
1.一种爬壁机器人磁吸附装置,其特征在于,包括: 移动机构,所述移动机构包括机器人主体(1)和定位轨板(13),定位轨板(13)的数量为两个,两个所述定位轨板(13)分别设置在机器人主体(1)的下表面两端,所述定位轨板(13)内部开设有滑槽(14),所述滑槽(14)内部设置有滑块(15),每个所述定位轨板(13)上的滑块(15)数量均为两个,所述滑块(15)与滑槽(14)滑动配合,两个所述滑块(15)下表面均设置有弹簧阻尼装置(12); 磁吸机构,所述磁吸机构包括第一活动轴(2)和第二活动轴(3),所述第一活动轴(2)和第二活动轴(3)分别设置在两个弹簧阻尼装置(12)的下方,所述第一活动轴(2)和第二活动轴(3)一端均设置有驱动组件,所述驱动组件一端连接有移动轮(4),所述移动轮(4)内固定安装有若干加强筋(6),每两个所述加强筋(6)之间均放置有永磁体(5),所述移动轮(4)周侧面套装有橡胶外层(7),所述第一活动轴(2)与第二活动轴(3)之间设置有活动组件,所述第一活动轴(2)通过活动组件与第二活动轴(3)转动配合。
2.根据权利要求1所述的一种爬壁机器人磁吸附装置,其特征在于:两个所述滑块(15)的一侧面均固定连接有第一弹簧件,两个所述第一弹簧件的另一端分别与滑槽(14)内部两侧面相连接,两个所述滑块(15)之间固定连接有第二弹簧件。
3.根据权利要求1所述的一种爬壁机器人磁吸附装置,其特征在于:所述弹簧阻尼装置(12)包括伸缩筒和伸缩柱,所述伸缩柱与伸缩筒滑动配合,所述伸缩筒内部一表面固定安装有缓冲弹簧,所述缓冲弹簧另一端与伸缩柱相连接。
4.根据权利要求3所述的一种爬壁机器人磁吸附装置,其特征在于:所述伸缩柱远离伸缩筒的一端固定连接有第二转动板(16),所述第一活动轴(2)和第二活动轴(3)周侧面均套接有套筒(18),所述套筒(18)上固定安装有第二活动轴座(17),所述第二转动板(16)与第二活动轴座(17)转动配合。
5.根据权利要求1所述的一种爬壁机器人磁吸附装置,其特征在于:所述活动组件包括安装在第二活动轴(3)一端的第一活动轴座(10),所述第一活动轴(2)的一端固定连接有第一转动板(11),所述第一活动轴座(10)上设置有第一转轴,所述第一转轴穿过第一转动板(11),所述第一转动板(11)通过第一转轴与第一活动轴座(10)转动配合。
6.根据权利要求1所述的一种爬壁机器人磁吸附装置,其特征在于:所述驱动组件包括设置在第一活动轴(2)以及第二活动轴(3)上的驱动电机(8),所述驱动电机(8)一端包括有驱动轴(9),所述移动轮(4)与驱动轴(9)相连接。
请联系平台
请联系平台




