
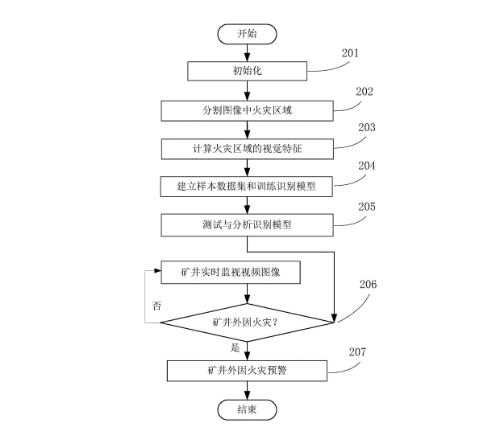
本发明公开了一种可见光视觉特征融合的矿井外因火灾监测方法,主要步骤包括:在矿井待监测区域的最优位置处安装可见光摄像机;采用改进的种子区域生长算法分割火灾区域;计算火灾区域的静态特征和动态特征,建立火灾样本数据集和识别模型;分别训练和测试识别模型;矿井火灾监测系统通过识别模型实时监测是否存在矿井外因火灾;当识别存在时,启动火灾报警。本发明的矿井外因火灾监测方法能够克服现有监测方法存在的问题,并能够在实现井下大面积监测的基础上,提高早期火灾的识别速度、精确度、可靠性,进而满足煤矿安全生产的实际需要。
1.一种可见光视觉特征融合的矿井外因火灾监测方法,其特征在于,所述的监测方法包括以下步骤: 步骤1:结合矿井待监视区域的空间特征、地质条件、煤质特性和采动影响,在待监测区域的最优位置处安装可见光摄像机; 步骤2:对采集的可见光视频进行等间隔采样,获取第t帧和t-1帧的可见光图像;采用改进的种子区域生长算法提取第t帧和t-1帧中的火灾区域; 步骤3:计算火灾区域的静态特征和动态特征;所述的静态特征为圆形度、矩形度、偏心率、颜色、纹理和尖角;所述的动态特征为面积变化率、质心移动、周长增长率、相似系数和闪动频率;融合得到的静态特征和动态特征,构建第t帧图像中火灾区域的特征向量; 步骤4:通过循环步骤2~步骤3,构建矿井外因火灾的样本数据集;随机抽取样本数据集中的一部分样本,构成神经网络模型的训练数据集,对神经网络模型进行训练; 步骤5:将剩余的另一部分样本作为测试数据集,输入训练后的神经网络模型,采用预测值判断是否存在矿井外因火灾,并采用客观评价方法分析所述神经网络模型的综合性能; 步骤6:采用改进的种子区域生长算法提取监视区域视频流中当前帧和前一帧的火灾疑似区域;通过步骤3构建当前帧中火灾疑似区域的特征向量,并将前帧中火灾疑似区域的特征向量输入训练后的神经网络模型,识别是否存在矿井外因火灾。
2.根据权利要求1所述的一种可见光视觉特征融合的矿井外因火灾监测方法,其特征在于,所述的最优位置为距离待监测目标区域最近距离不得小于5米,最远距离不得大于50米,安装位置须避开固定干扰光源,或于顺光方向安装,并且安装于坚固的顶板或巷道侧壁,不得影响井下正常施工作业。
3.根据权利要求1所述的一种可见光视觉特征融合的矿井外因火灾监测方法,其特征在于,所述改进的种子区域生长算法包括:将第t帧和t-1帧图像进行平滑滤波,并选取滤波后图像中灰度为1的像素点作为种子点;将所述种子点的3×3邻域作为起始的生长区域,并且进行8邻域扩展;选取邻域像素的灰度均值和方差作为区域生长条件,当邻域像素与种子点的灰度均值和方差小于设定的生长阈值时,将所述种子点相对的像素点归并到已生长区域; 所述的灰度均值通过计算得到;所述的方差通过计算得到;所述的区域生长条件为式中fm(x,y)和fv(x,y)分别为种子点f(x,y)对应邻域的均值和方差;seedpoint(x0,y0)为种子点f(x,y)的灰度;T1和T2分别为生长阈值,T1和T2与方差fv(x,y)有关;r为邻域半径,r=1。
4.根据权利要求1所述的一种可见光视觉特征融合的矿井外因火灾监测方法,其特征在于,所述的纹理特征通过计算火灾区域的图像熵得到,所述的图像熵计算公式为式中RIE为图像熵;Pi为火灾疑似区域中灰度i出现的概率;L为可见光图像的灰度等级。
5.根据权利要求1所述的一种可见光视觉特征融合的矿井外因火灾监测方法,其特征在于,所述的尖角特征计算过程为: 步骤1:采用遍历法寻找火灾疑似区域的左基点和右基点,并通过一阶微分算子求取“左基点-最高点-右基点”连接曲线在每一边缘点处的导数; 步骤2:根据边缘点的导数判别是否存在过零点,若存在过零点且左侧导数为正,右侧导数为负,则判定该边缘点为局部尖角; 步骤3:查找每个尖角下侧第N行的左边缘点和右边缘点坐标,并由左边缘点和右边缘点坐标计算尖角对应的宽度,若尖角的宽高比小于0.5,则判定该尖角为火焰尖角,否则判定为噪声或毛刺。
6.根据权利要求1所述的一种可见光视觉特征融合的矿井外因火灾监测方法,其特征在于,所述的闪动频率获取过程为:采用相似系数寻找第t帧和t-1帧中趋于相同的火灾疑似区域,计算趋于相同的火灾疑似区域对应的累计灰度差值变化率,所述的累计灰度差值变化率式中Fj为第j个火灾疑似区域的累计灰度差值变化率;M、N为第j个火灾疑似区域的像素总数;Vt,i为第t帧图像中火灾疑似区域内第i个像素值;Vt-1,i为第t-1帧图像中火灾疑似区域内第i个像素值;Δt为第t-1帧与第t帧的时间间隔。
7.根据权利要求1所述的一种可见光视觉特征融合的矿井外因火灾监测方法,其特征在于,所述的相似系数式中μt、μt-1分别为第t帧和t-1帧中火源疑似区域的平均灰度;σt、σt-1分别为第t帧和t-1帧火源疑似区域的标准差;C1,C2为常数,避免分母为0;通常取C1=(K1·L)2,C2=(K2·L)2,一般地K1=0.01,K2=0.03,L为灰度图像的动态范围,L=255。
请联系平台
请联系平台




