
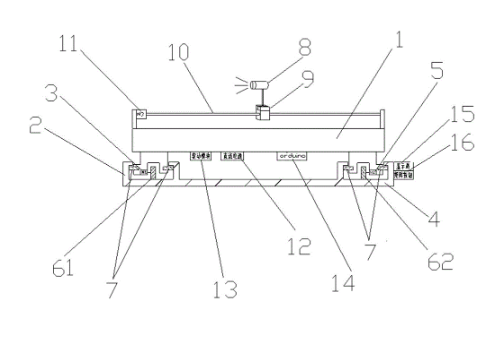
本实用新型公开了一种多角度采集复合焊接电弧光谱图像的装置,包括机械运动部分和运动控制部分,所述机械运动部分包括搭载平台、内侧轨道、外侧轨道以及高速摄像机,所述高速摄像机安装于搭载平台上方,所述搭载平台横跨于内侧轨道和外侧轨道的上方,所述搭载平台下方两端的内外侧轨道内分别安装有内轨道驱动轮和外轨道驱动轮,所述运动控制部分包括Arduino控制板和驱动模块,所述Arduino控制板和驱动模块分别安装于搭载平台的下方。本实用新型可灵活调整高速摄像机与待测复合焊接电弧等离子体之间的拍摄距离和拍摄角度,便于从不同角度对复合焊接电弧光谱图像进行连续采集,为进一步复合焊接电弧光谱分析奠定实验基础。
1.一种多角度采集复合焊接电弧光谱图像的装置,其特征在于,包括机械运动部分和运动控制部分,所述机械运动部分包括搭载平台、内侧轨道、外侧轨道以及高速摄像机,所述高速摄像机安装于搭载平台上方,所述搭载平台横跨于内侧轨道和外侧轨道的上方,所述搭载平台下方两端的内外侧轨道内分别安装有内轨道驱动轮和外轨道驱动轮,所述运动控制部分包括Arduino控制板和驱动模块,所述Arduino控制板和驱动模块分别安装于搭载平台的下方。
2.根据权利要求1所述的一种多角度采集复合焊接电弧光谱图像的装置,其特征在于,所述内侧轨道和外侧轨道均为圆弧轨道,所述内侧轨道和外侧轨道的轨道内两侧壁上均分别安装有一个导轮。
3.根据权利要求1所述的一种多角度采集复合焊接电弧光谱图像的装置,其特征在于,所述驱动模块包括第一电机驱动模块、第二电机驱动模块以及第三电机驱动模块,所述第一电机驱动模块、第二电机驱动模块以及第三电机驱动模块分别与Arduino控制板连接。
4.根据权利要求3所述的一种多角度采集复合焊接电弧光谱图像的装置,其特征在于,所述内轨道驱动轮上连接有内轨道驱动轮步进电机,所述内轨道驱动轮步进电机与第一电机驱动模块连接。
5.根据权利要求3所述的一种多角度采集复合焊接电弧光谱图像的装置,其特征在于,所述外轨道驱动轮上连接有外轨道驱动轮步进电机,所述外轨道驱动轮步进电机与第二电机驱动模块连接。
6.根据权利要求3所述的一种多角度采集复合焊接电弧光谱图像的装置,其特征在于,所述机械运动部分还包括丝杠和底座夹具,所述丝杠置于搭载平台上方,所述高速摄像机通过底座夹具固定于丝杠上。
7.根据权利要求6所述的一种多角度采集复合焊接电弧光谱图像的装置,其特征在于,所述丝杠的一端设有丝杠进给运动步进电机,所述丝杠进给运动步进电机与第三电机驱动模块连接。
8.根据权利要求1所述的一种多角度采集复合焊接电弧光谱图像的装置,其特征在于,所述运动控制部分还包括显示屏和矩阵按钮,所述显示屏和矩阵按钮分别与Arduino控制板连接。
9.根据权利要求3所述的一种多角度采集复合焊接电弧光谱图像的装置,其特征在于,所述运动控制部分还包括直流电源,所述直流电源安装于搭载平台的下方,所述直流电源与Arduino控制板、第一电机驱动模块、第二电机驱动模块以及第三电机驱动模块连接。
10.根据权利要求1所述的一种多角度采集复合焊接电弧光谱图像的装置,其特征在于,所述高速摄像机的镜头前安装有带通滤波片。
请联系平台
请联系平台




