
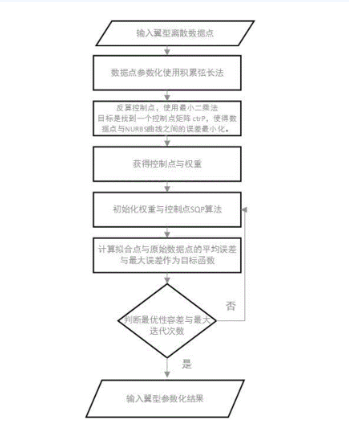
本发明公开了一种基于改进NURBS的风力机翼型参数化方法,包括对原始翼型的坐标点进行预处理,获取上表面拟合曲线和下表面拟合曲线;分离翼型上表面和下表面采用NURBS曲线表示对所述上表面拟合曲线和所述下表面拟合曲线进行优化,获得控制点与权重值,进行翼型参数化。基于梯度的序列二次规划算法以最小化均值误差与最小化最大误差为目标函数,以控制点与权重值为设计变量,对控制点与权重值进行优化,获取参数化最优结果。本发明提高翼型拟合精度,同时保持良好的光滑性,增加求解的速度与解的质量,降低误差。
1.一种基于改进NURBS的风力机翼型参数化方法,其特征在于,包括: 对原始翼型的坐标点进行预处理,获取上表面拟合曲线和下表面拟合曲线; 分离翼型上表面和下表面采用NURBS曲线表示对所述上表面拟合曲线和所述下表面拟合曲线进行优化,获得控制点与权重值,进行翼型参数化; 基于梯度的序列二次规划算法以最小化均值误差与最小化最大误差为目标函数,以控制点与权重值为设计变量,对控制点与权重值进行优化,获取参数化最优结果; 对所述上表面拟合曲线和所述下表面拟合曲线,获得控制点与权重值的方法包括: 计算节点矢量计算如下, U=[u0,u1,…un+k+3] 其中,U为节点矢量值,Pi为控制点坐标; 反算控制顶点计算如下, 通过构建一个线性方程组,将问题转化为一个最小二乘问题,所述线性方程组的形式如下: (NT·N)·crtP=NT·r 其中,NT表示N的转置,N表示节点矢量系数矩阵,r表示数据点与首尾控制点之间的差异,crtP为控制点矩阵; 通过遍历数据点计算r矩阵,公式如下: ri=di-d1·N(ui)-dm·N(ui) 其中,di表示第i个数据点的坐标,ui表示第i个数据点的参数值,N(ui)表示在参数值ui处的样条基函数的值,dm表示第m个数据点的坐标; 通过遍历数据点计算N矩阵,公式如下: Nij=N(uj,i) 其中,Nij表示在参数值uj处的样条基函数的第i个分量的值,uj,i表示第i行第j列节点矢量; 通过解线性方程组得到控制点矩阵ctrP,公式如下: crtP=(NT·N)-1·NT·r; 基于梯度的序列二次规划算法以最小化均值误差与最小化最大误差为目标函数中,获取所述最小化均值误差和所述最小化最大误差的方法为: 其中,εmea为均值误差,di为原始翼型与目标曲线投影上两者之间的距离,C为翼型弦长,n为各个翼型点的数量,εmax为最大误差; 所述目标函数表示为:F(X)=2εmea+εmax 其中,εmea为均值误差,εmax为最大误差,X为设计变量。
2.如权利要求1所述的基于改进NURBS的风力机翼型参数化方法,其特征在于, 分离翼型上表面和下表面采用NURBS曲线表示的方法为: 其中,Pi为控制点坐标,ωi为各自的权重值,Ni,p为p次b样条基函数,A(u)为曲线上某点的位置,Ri,p(μ)为移动基连接μ∈[0,1]的分段有理函数。
3.如权利要求1所述的基于改进NURBS的风力机翼型参数化方法,其特征在于, 对所述翼型的坐标点进行预处理,获取上表面拟合曲线和下表面拟合曲线的过程包括:对所述翼型的坐标点进行预处理,将第一个坐标点和最后一个的坐标点分别作为第一个控制点和最后一个控制点固定在翼型的前缘和尾缘,采用均匀参数法沿每条曲线分别设置若干控制点,对所述若干控制点进行优化,获取所述上表面拟合曲线和所述下表面拟合曲线。
4.如权利要求1所述的基于改进NURBS的风力机翼型参数化方法,其特征在于, 所述设计变量表示为:X={x1,y1,ω1,...,xn,yn,ωn} 其中,xn为翼型控制点的x坐标值,yn为翼型控制点的y坐标值,ωn为对应的权重向量。
请联系平台
请联系平台




